طراح
زندگی یعنی پژوهش و فهمیدن چیز جدید ( پروفسور حسابی)طراح
زندگی یعنی پژوهش و فهمیدن چیز جدید ( پروفسور حسابی)درباره من
 شاکری لیسانس کنترل
insta:@designer2013.blogsky
telegram:@Abolfazl_shakeri
- زندگی یعنی پژوهش و فهمیدن چیز جدید (پروفسور حسابی)
ادامه...
شاکری لیسانس کنترل
insta:@designer2013.blogsky
telegram:@Abolfazl_shakeri
- زندگی یعنی پژوهش و فهمیدن چیز جدید (پروفسور حسابی)
ادامه...
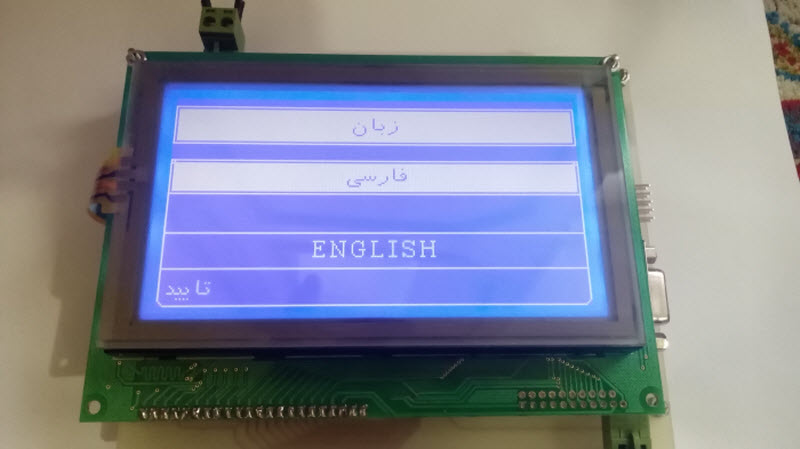
کنترل پیامکی سیم کارتی
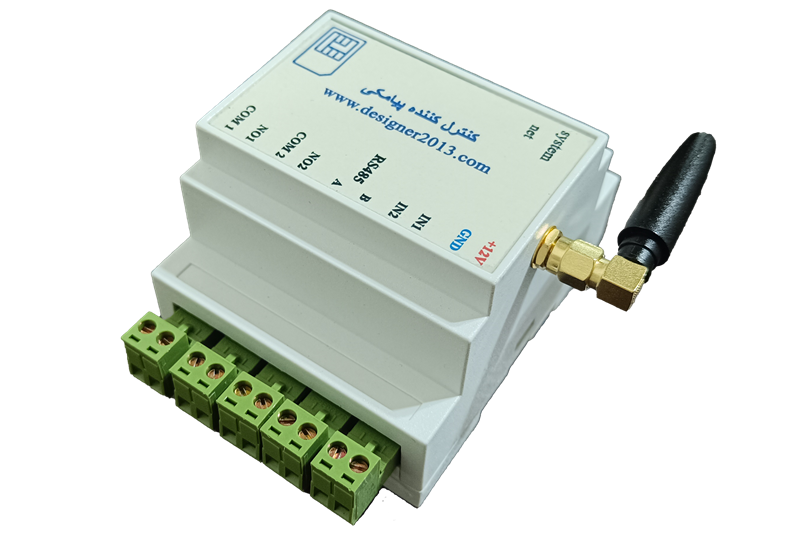
کنترل پیامکی، مدیریت هوشمند تجهیزات
کنترل پیامکی سیم کارتی یکی از فناوریهای مدرن و کارآمد برای مدیریت و نظارت از راه دور بر تجهیزات و سیستمها است. این دستگاهها با استفاده از پیامک، تماس تلفنی یا اپلیکیشن موبایل به کاربران این امکان را میدهند که بهسادگی تجهیزات خود را کنترل کنند. در این مقاله، با مفهوم کنترل کننده پیامکی، کاربردها، مزایا، و جنبههای سختافزاری و نرمافزاری آنها آشنا میشویم.
کنترل پیامکی چیست؟
کنترل پیامکی، دستگاهی هوشمند است که با استفاده از شبکه GSM، امکان ارسال و دریافت پیامک و دستورات کنترلی را برای مدیریت تجهیزات فراهم میکند. این دستگاهها معمولاً دارای ورودیها و خروجیهای متعددی هستند و برای کاربردهای متنوعی در خانه، صنعت و کشاورزی استفاده میشوند.
مزایای کنترل پیامکی سیمکارتی
- دسترسی از هر نقطه جغرافیایی:
کنترل تجهیزات بدون محدودیت مکانی و تنها با ارسال یک پیامک یا استفاده از اپلیکیشن. - افزایش بهرهوری:
با زمانبندی دقیق و مدیریت بهتر تجهیزات، بهرهوری سیستمها افزایش پیدا میکند. - صرفهجویی در هزینهها:
کاهش نیاز به نیروی انسانی برای نظارت حضوری و بهینهسازی مصرف انرژی. - امنیت بالا:
ارسال پیامکهای هشدار در شرایط بحرانی (مانند قطعی برق یا تغییر وضعیت ورودیها). - انعطافپذیری:
امکان اتصال به انواع تجهیزات صنعتی، کشاورزی یا خانگی و شخصیسازی عملکرد دستگاه.
کاربردهای کنترل پیامکی سیم کارتی
- صنعتی:
کنترل و نظارت بر ماشینآلات و تجهیزات الکتریکی در کارخانجات. - کشاورزی:
مدیریت سیستمهای آبیاری، تهویه و روشنایی گلخانهها. - خانگی:
روشن و خاموش کردن چراغها، کنترل پمپها و تجهیزات الکترونیکی خانه. - امنیتی:
ارسال هشدارهای امنیتی در صورت ورود غیرمجاز یا تغییر وضعیت سنسورها.
جزئیات سختافزاری کنترل پیامکی سیم کارتی
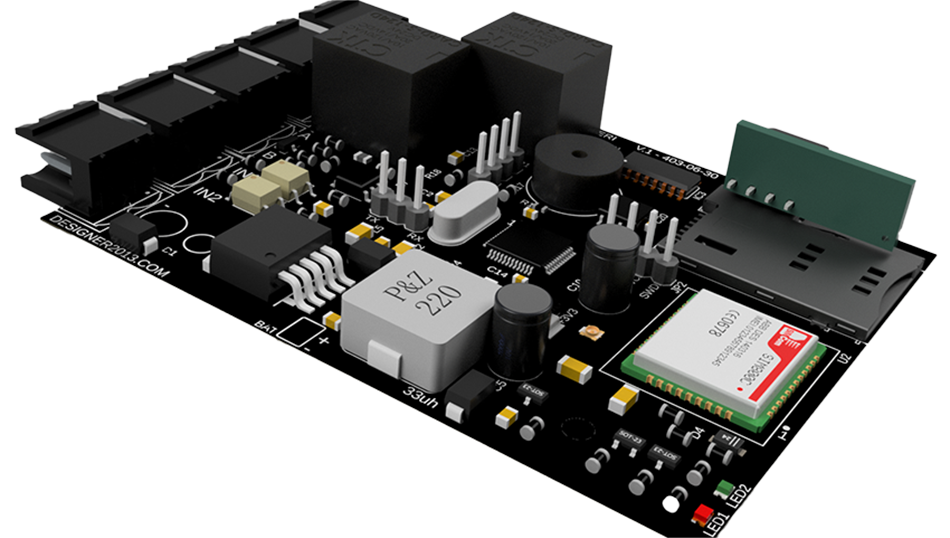
کنترل کنندههای پیامکی معمولاً شامل بخشهای زیر هستند:
- ماژول GSM:
وظیفه برقراری ارتباط پیامکی و تلفنی را بر عهده دارد. - ورودیها و خروجیها:
شامل ورودیهای دیجیتال و خروجیهای رلهای برای اتصال به تجهیزات مختلف. - باتری داخلی:
در صورت قطعی برق، دستگاه با استفاده از باتری داخلی به فعالیت خود ادامه میدهد و هشدارهای لازم را ارسال میکند. - پورتهای توسعه:
مانند RS485 برای افزایش تعداد ورودی و خروجیها یا اتصال به سنسورهای محیطی.
جزئیات نرمافزاری کنترل پیامکی
- اپلیکیشن موبایل:
امکان مدیریت دستگاه از طریق اپلیکیشن اندرویدی با رابط کاربری ساده و فارسی. - پشتیبانی از پیامک فارسی:
دستگاهها میتوانند پیامها را به زبان فارسی ارسال و دریافت کنند. - زمانبندی پیشرفته:
تنظیم زمان روشن و خاموش شدن تجهیزات به صورت خودکار. - ارتباط آسان با کاربر:
از طریق پیامک یا اپلیکیشن، وضعیت ورودیها، خروجیها و سایر جزئیات گزارش میشود.
چرا از کنترل پیامکی سیمکارتی استفاده کنیم؟
کنترل کنندههای پیامکی، راهحلی هوشمند برای مدیریت تجهیزات از راه دور هستند. آنها به شما کمک میکنند تا نهتنها در وقت و هزینه صرفهجویی کنید، بلکه امنیت و بهرهوری سیستمهای خود را افزایش دهید. اگر به دنبال دستگاهی با امکانات کامل هستید، پیشنهاد ما کنترل کننده پیامکی PC900 است.
این دستگاه با قابلیتهای پیشرفته، مناسب برای کاربردهای متنوع خانگی، صنعتی و کشاورزی بوده و تمامی نیازهای شما را برآورده میکند.
برای خرید و اطلاعات بیشتر به صفحه محصول مراجعه کنید.
دانلود اپلیکیشن اندروید کنترل پیامکی
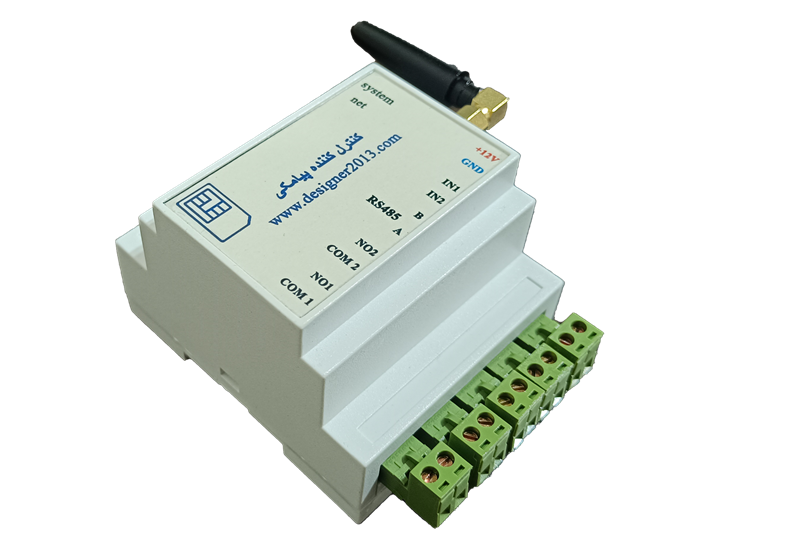
مشخصات پیام کنترل مدل: PC900
ولتاژ تغذیه 12 ولت
پشتیبانی از زبان فارسی
دارای اپلیکیشن اندروید
دارای ریموت کنترل
دارای 2 خروجی رله ای 5 آمپر
دارای 2 ورودی ایزوله دیجیتال
دارای امکان گزارش شارژ سیم کارت
دارای امکان کنترل خروجی ها با تماس
دارای باتری داخلی جهت اعلام قطع و وصل برق
دارای امکان تعریف 2 شماره مدیر و 4 شماره کاربر
دارای امکان اتصال وضعیت ورودی ها به خروجی ها
دارای ساعت داخلی و امکان زمان دهی به خروجی ها
دارای ارتباط RS485 جهت توسعه تعداد ورودی/ خروجی ها
امکان کنترل خروجی ها در سه حالت دائم، لحظه ای و زمان دار
ابعاد : طول 8.5 سانتی متر – عرض 7 سانتی متر
دانلود دفترچه راهنمای کنترل پیامکی
کنترل کنندههای پیامکی ابزارهایی پرکاربرد و هوشمند هستند که به شما اجازه میدهند تجهیزات خود را بهصورت کارآمد و ایمن مدیریت کنید. با خرید یک کنترل کننده پیامکی، میتوانید آرامش خاطر و بهرهوری بیشتری در مدیریت سیستمهای خود داشته باشید.
اگر سوال یا نظری در این زمینه دارید، خوشحال میشویم در بخش نظرات سایت شما را راهنمایی کنیم!
آموزش فیوژن 360
دوره آموزش نرم افزار طراحی سه بعدی فیوژن 360 در سایت قرار گرفت.
فیوژن 360 یک نرم افزار قدرتمند و جامع برای طراحی سه بعدی است که توسط شرکت Autodesk ارائه شده است. این نرم افزار از قابلیت های مختلفی مانند مدل سازی پارامتری، مونتاژ، شبیه سازی، تحلیل تنش و کرنش، طراحی به کمک ماشین (CAM) و رندرینگ برخوردار است.
کاربردهای فیوژن 360:
طراحی صنعتی: طراحی قطعات و تجهیزات صنعتی
طراحی محصول: طراحی و توسعه محصولات جدید
مهندسی مکانیک: طراحی و تحلیل سیستم های مکانیکی
معماری: طراحی و مدل سازی ساختمان ها
انیمیشن و بازی: خلق شخصیت ها، محیط ها، اشیاء
مزایای فیوژن 360:
قابلیت های قدرتمند: فیوژن 360 از طیف وسیعی از ابزارهای طراحی و تحلیل برخوردار است.
رابط کاربری بصری: فیوژن 360 رابط کاربری ساده و آسان برای یادگیری دارد.
پلتفرم ابری: فیوژن 360 بر روی پلتفرم ابری اجرا می شود، بنابراین می توانید از هر کجا به طرح های خود دسترسی داشته باشید.
نسخه رایگان: فیوژن 360 دارای یک نسخه رایگان با قابلیت های محدود است که برای کاربری های تا سطح متوسط مناسب است.
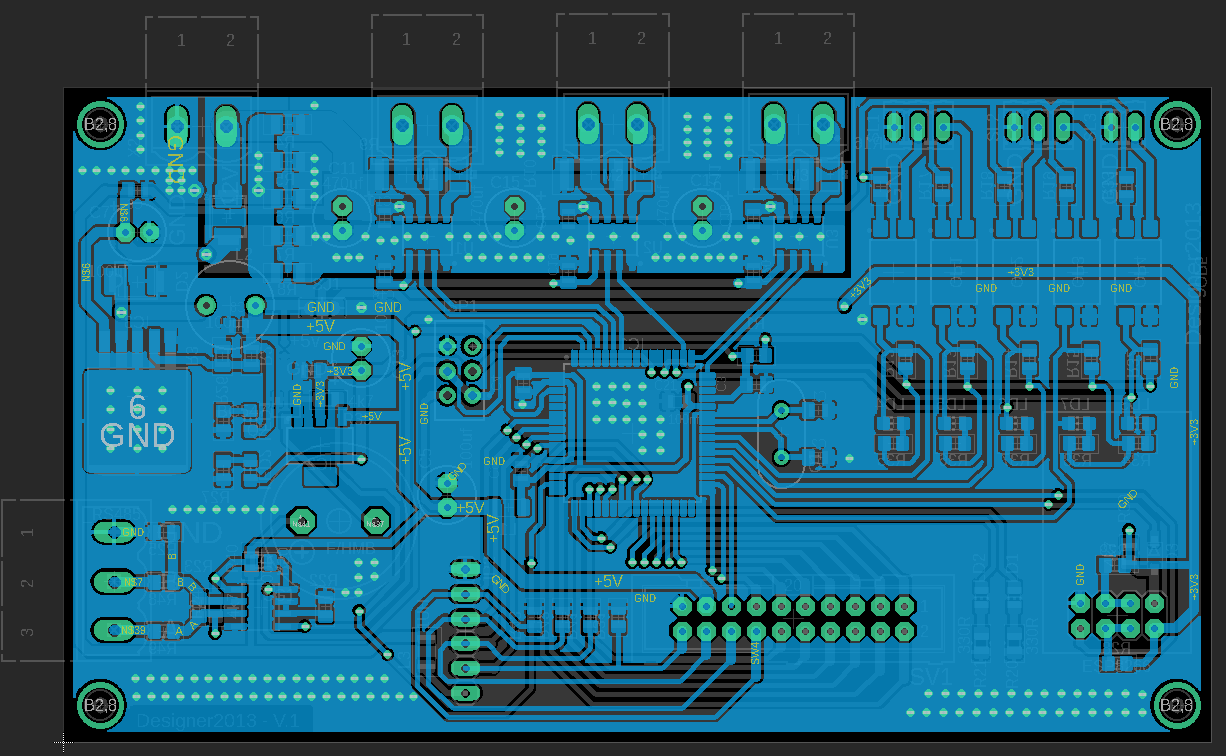
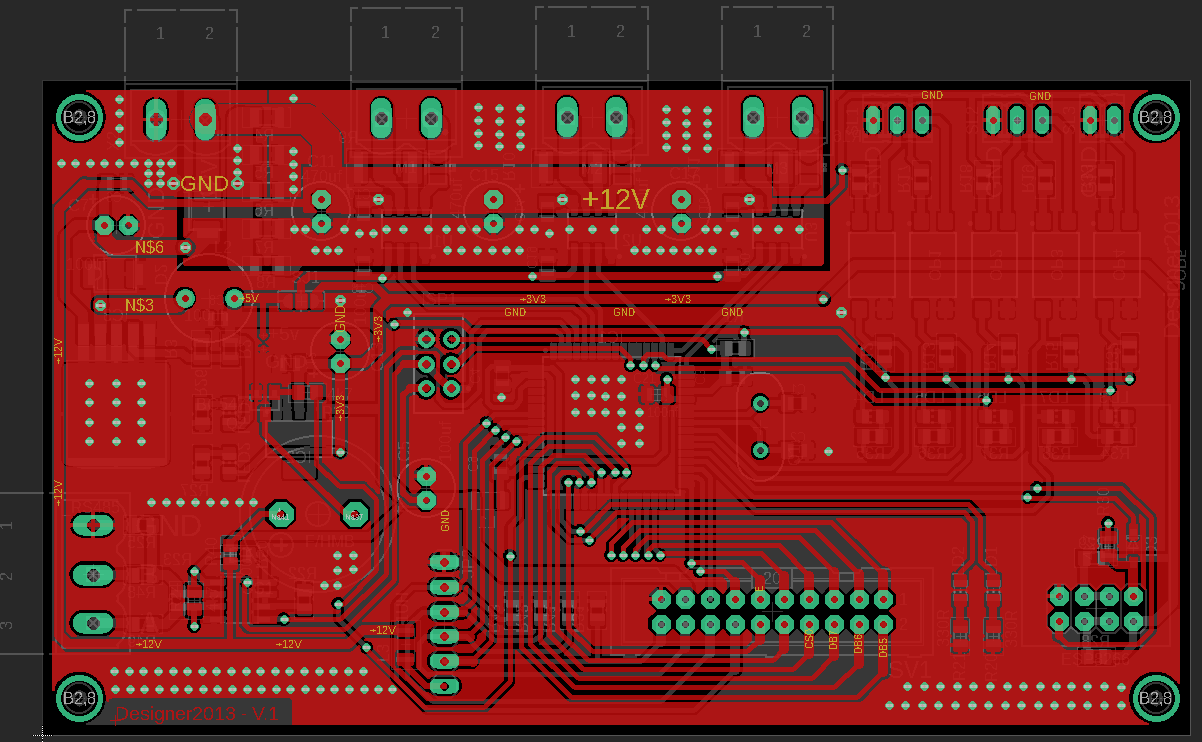
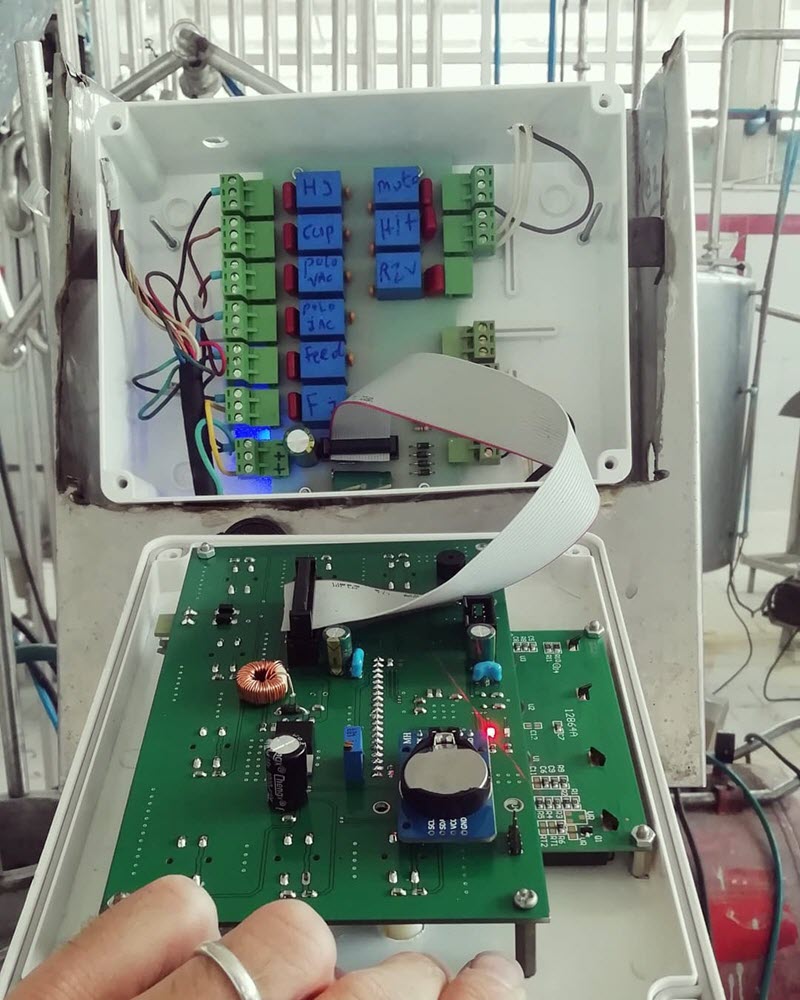
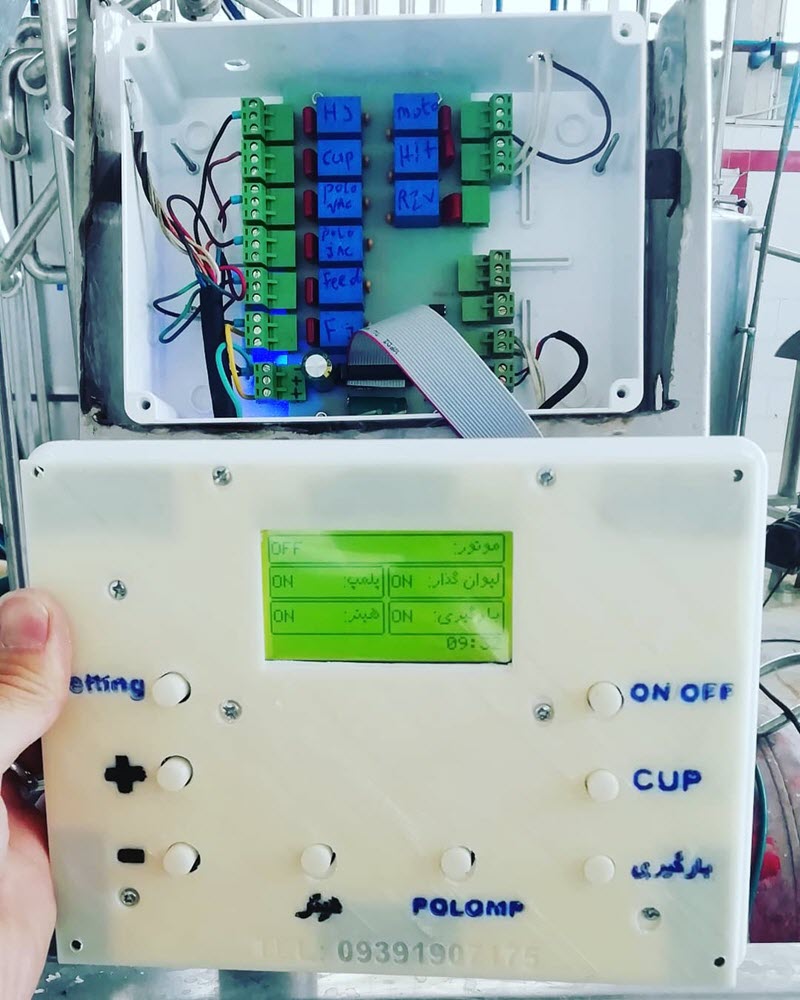
برد کنترلر 1
مشخصات:
- میکروکنترلر MEGA64 / MEGA128
-سه خروجی موتور DC با درایور DRV8870
- 5 ورودی اپتوکوپلری
- ارتباط RS485
- ماژول WiFi
- بیزر
- در اختیار قرار داشتن 18 پایه از میکروکنترلر
طراحی شده با EAGLE

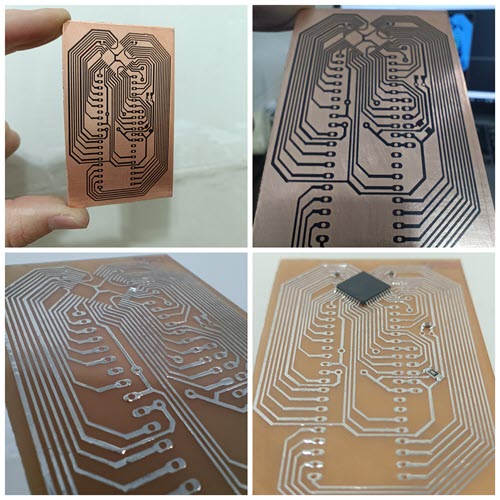
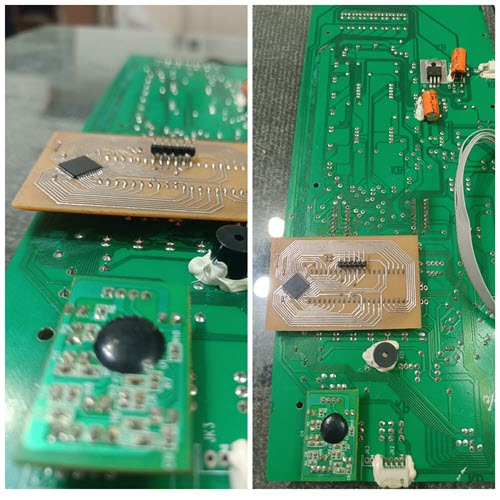
برد جایگزین میکروکنترلر تردمیل
به علت سوختن میکروکنترلر PIC دستگاه تردمیل، یک برد جایگزین با استفاده از میکروی AVR طراحی، ساخته و برنامه نویسی شد.
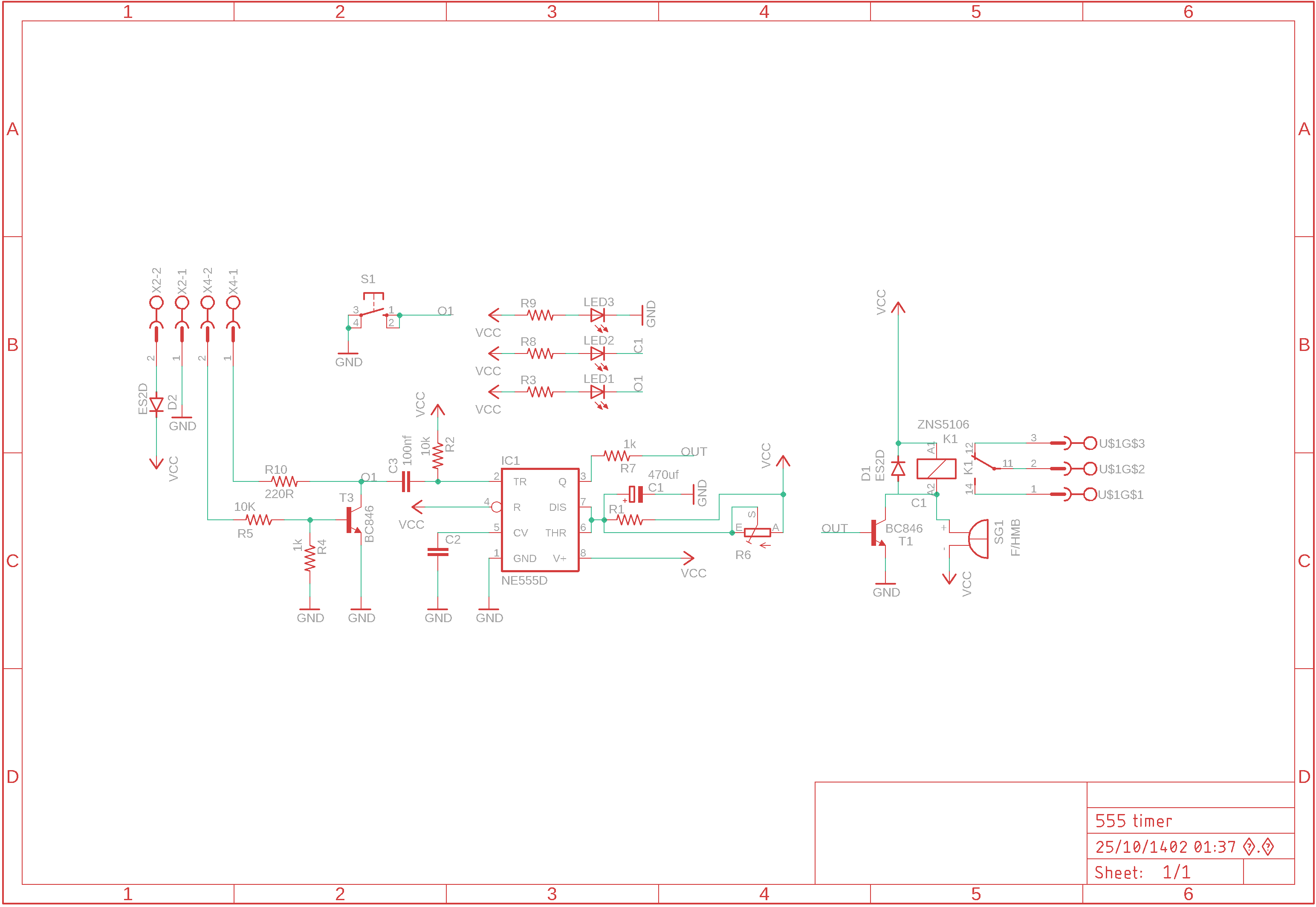
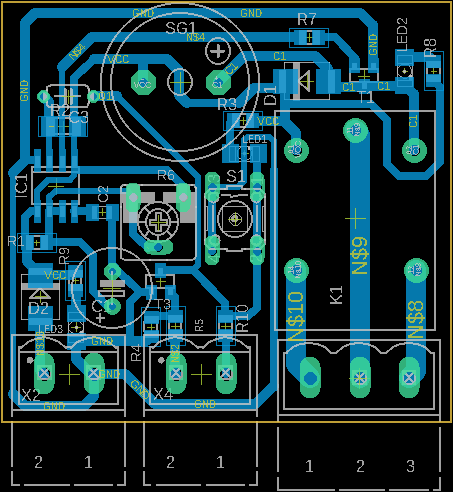
سورس شماتیک و PCB تایمر ساده با 555


میانبر های محیط EAGLE
با استفاده از کیبرد و تایپ یک یا دو حرف میتوانید سریعتر به ابزار مورد نظر دسترسی داشته باشید.
میابنرهای محیط شماتیک :
با تایپ عبارت های زیر به ابزار مربوطه دسترسی پیدا میکنید
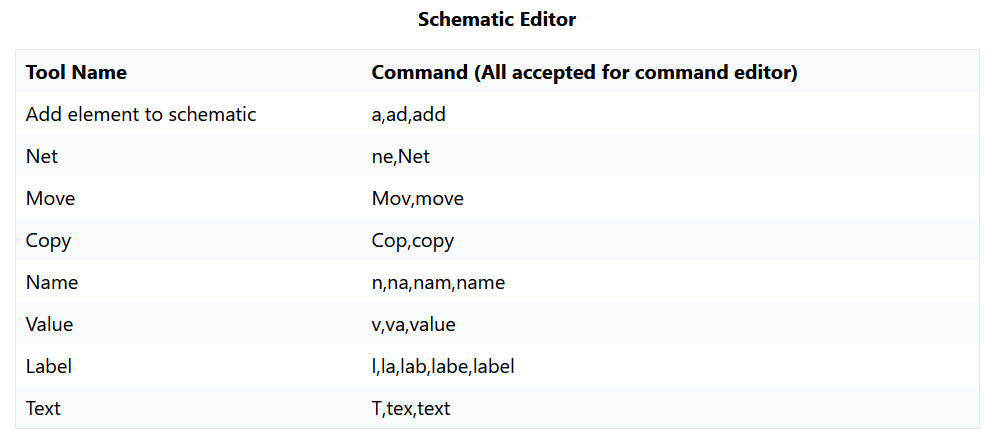
1- برای پیدا کردن یا هایلایت کردن یک قطعه یا مسیر میتوانید عبارت show x را تایپ کنید. x نام قطعه یا مسیر میباشد.
2- برای اضافه کردن قطعه به شماتیک حرف a را تایپ و اینتر بزنید.
میانبرهای محیط PCB :
با تایپ عبارت های زیر به ابزار مربوطه دسترسی پیدا میکنید
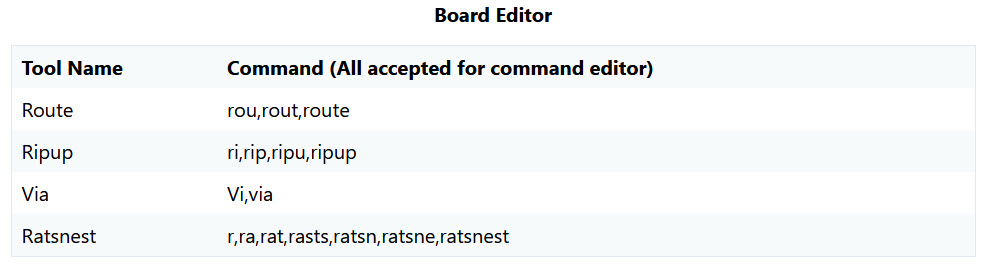
1- برای تغییر حالت wire bend از کلید ctrl + کلید راست موس استفاده کنید.
2- زمان rout کردن (رسم مسیر) برای تغییر ضخامت مسیر کافیست، ضخامت مورد نظر را تایپ کنید و اینتر بزنید.
3- زمان rout کردن (رسم مسیر) برای غیرفعال کردن یک سیکنال (نمایش ندادن) ratsnest ! x را تایپ کنید. x نام سیگنالی هست که میخواهید از حالت نمایش خارج شود. برای مثال ratsnest ! GND - برای فعال کردن یا به حالت نمایش در آوردت مجدد کافیست علامت ! را حذف کنید.
4- همانطور که میدانید ripup کردن مسیر چند حالت دارد. در حالت عادی با انتخاب ابزار ripup و کلیک کردن بر روی مسیر رسم شده، اتصال تا اولین مکان تغییر مسیر جدا میشود. اگر کلید CTRL را نگه دارید تمام مسیر بین دو پین جدا میشود و اگر کلید CTRL + ALT را نگه داید تمام مسیر سیگنال جدا میشود ( UNROUT )
5- از کلید ترکیبی ALT + F2 برای Fit window استفاده کنید.
6- برای zoom in کردن از کلید F3 استفاده کنید
7- برای zoom out از کلید F4 استفاده کنید.
8- از کلید F5 میتوانید برای جابه جا کردن محیط edito با توجه به قرار گیری موس استفاده کنید.(میانبر جالبی هست)
9- از کلید F6 برای فعال/غیرفعال کردن GRID استفاده کنید.
10- برای قرار دادن وایا و جابه جایی به لایه بعدی از کلید Space استفاده کنید.
11 - برای انتخاب و چیدمان راحت تر قطعات میتونید از ulp به نام pickup استفاده کنید.
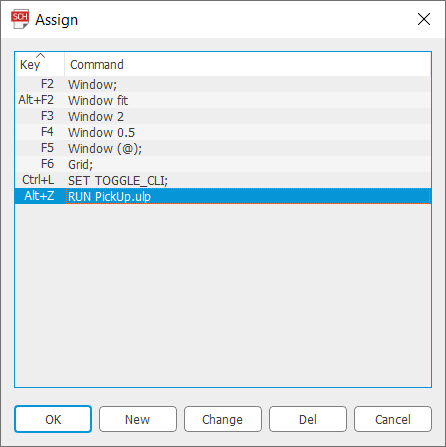
از طریق command line با دستور ASSIGN هم میتونید براش میابنر تعریف کنید مثلا:
ASSIGN A+Z 'RUN PickUp.ulp';
12- برای اینکه اتصال به صورت teardrop باشه میتونید از ULP به همین اسم استفاده کنید.
فایل تعریف میانبر برای محیط ایگل:
تمام محتوای فایل را در command line محیط PCB و شماتیک کپی کنید و اینتر بزنید


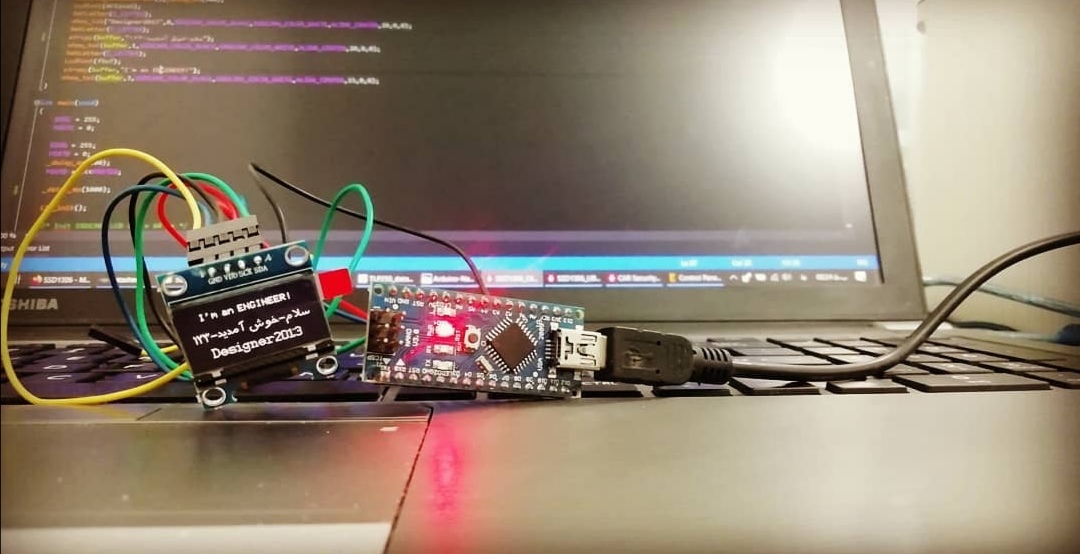

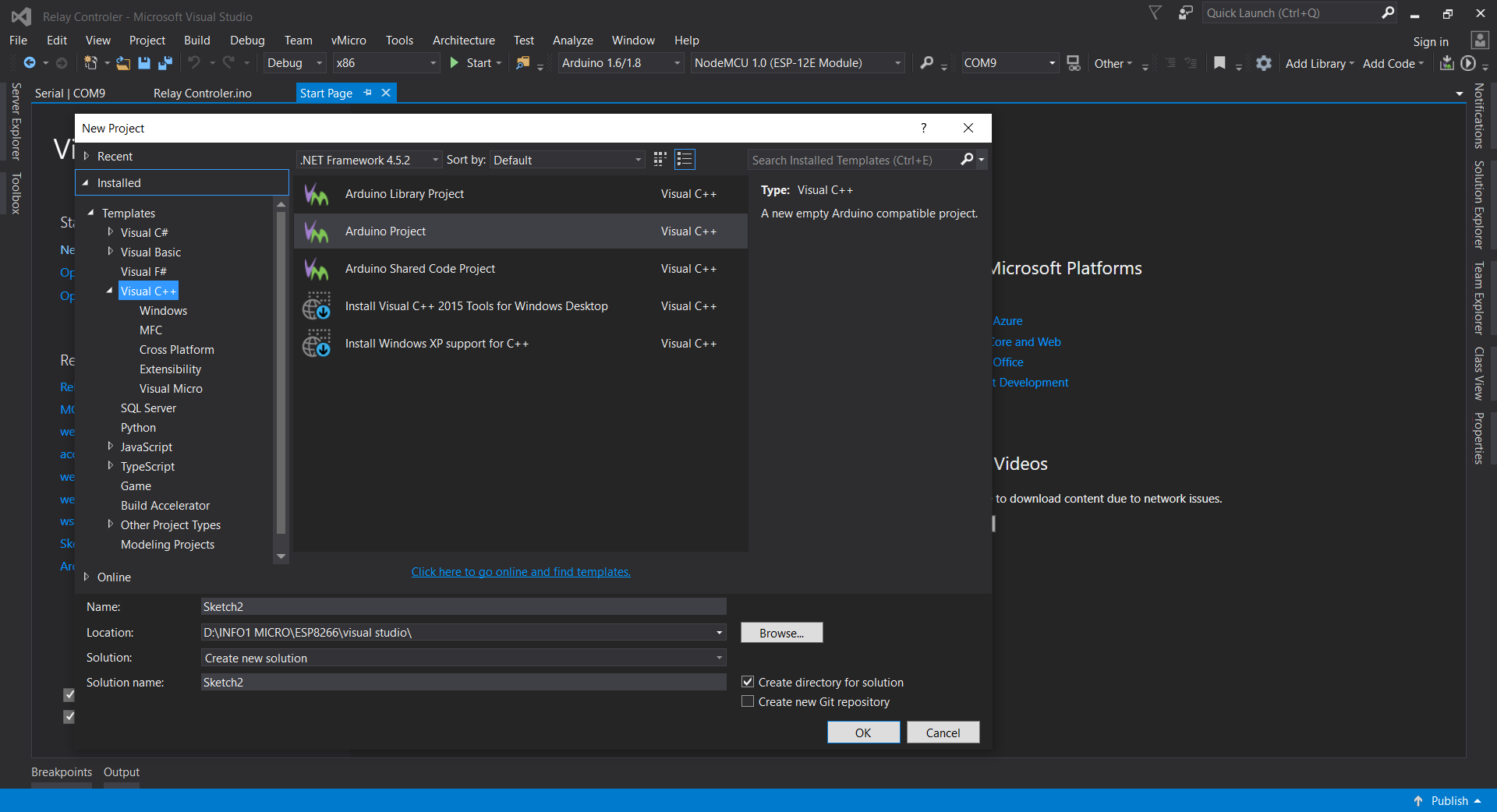
کد نویسی ESP8266 در ویژوال استودیو
اگر به دنبال برنامه نویسی برای ESP8266 هستید و مثل بنده از IDE ساده و ضعیف آردینو رنج میبرید. میتوانید اکستنشن آردینو را برای ویژوال استودیو نصب کنید و در محیط قدرتمند ویژوال استودیو برنامه نویسی ESP8266 و یا آردینو را انجام بدهید و از برنامه نویسی لذت ببرید.
فایل افزونه آردینو برای ویژوال استودیو:
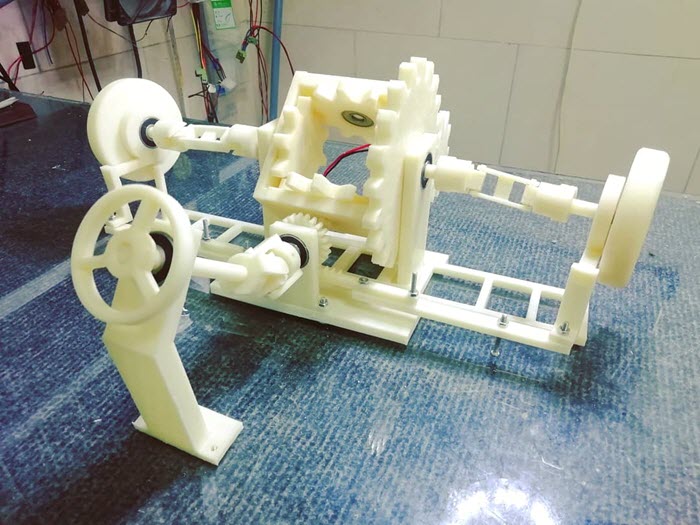
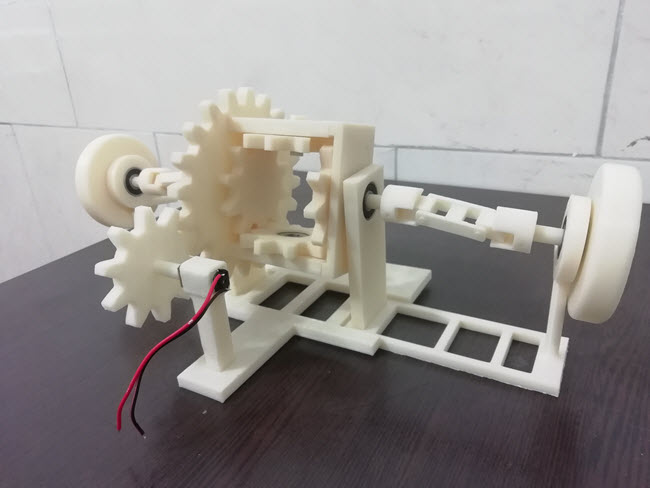
مدل دیفرانسیل جلو ساخته شده با پرینت سه بعدی
برای تهیه فایل های STL جهت پرینت، به شماره 09391907175 پیام بدهید.
آموزش ویدئویی نرم افزار ایگل
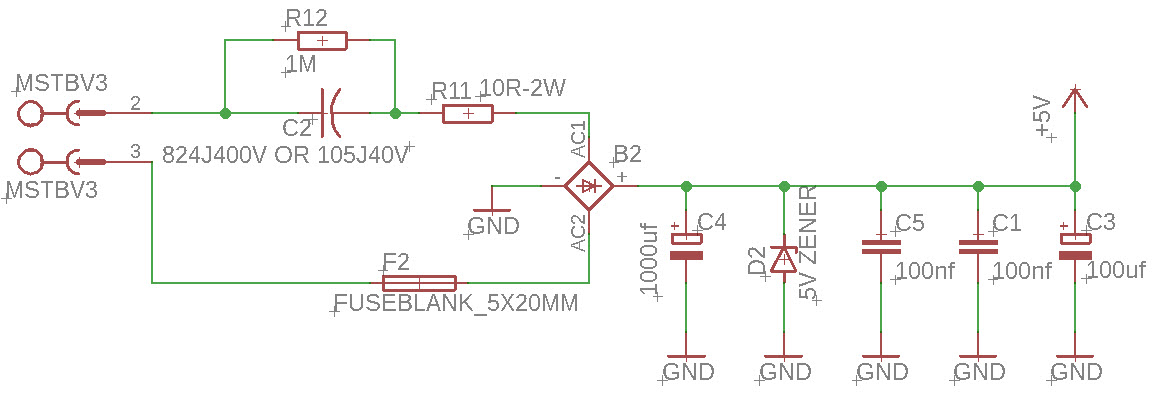
منبع تغذیه بدون ترانس
منبع تغذیه بدون ترانس. 5 ولت.
معایب: عدم ایزوله بودن خروجی از برق شهر - جریان محدود - احتمال ظاهر شدن هارمونی های برق شهر به صورت تضعیف شده در خروجی تغذیه که در مدارات حساس نیاز به استفاده از EMI فیلتر میباشد.
محاسن: قیمت پایین - پیچیدگی کم

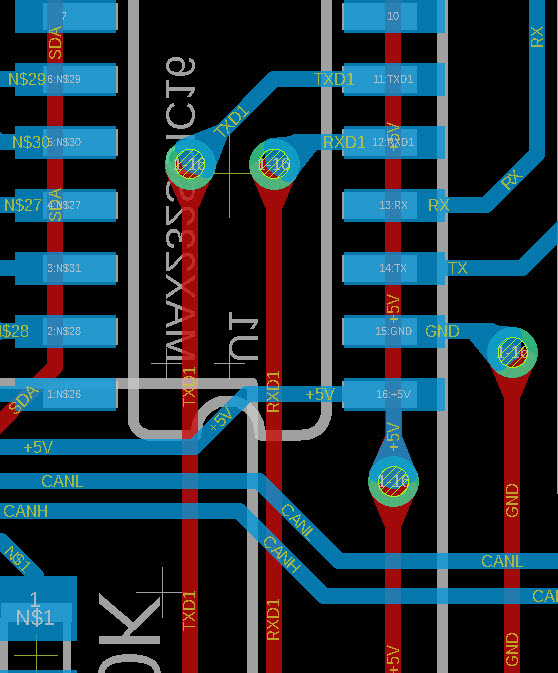
مدل سه بعدی PCB
پرینتر سه بعدی
سفارشات چاپ سه بعدی پذیرفته میشود.
ابعاد قابل چاپ طول: 220 - عرض: 220 - ارتفاع:250 میلی متر

فیوژن 360
نرم افزار طراحی سه بعدی فیوژن 360 از زیرمجموعه های اتودسک ، با محیطی یوزر فرندی ، یادگیری آسان ، حجم کم و در عین حال حرفه ای که برای طراحی قاب، قالب، محصول ، طراحی قطعات جهت چاپ سه بعدی بسیار کاربردی میباشد و یادگیری آن برای مهندسین قطعا مفید هست.
برای یادگیری میتوانید از آموزش های سایت استفاده کنید: www.designer2013.com
ویدئوی معرفی:

سورس برنامه و PCB ربات مسیریاب + اپلیکیشن اندروید
سلام به دوست داران الکترونیک و دنیای برنامه نویسی.
در این مطلب می خواهم که اطلاعات مربوط به ساخت رباتی که ویدئوی آن را قرار دادم برایتان منتشر کنم.
1 - مدار و شماتیک
لیست قطعات:
AMS1117 - ,MC34063 - LM324 - ATXMEGA32A4U - SRF05 - ESP8266 - L293
1-1 : واحد تغذیه: برای مدار نیاز به ولتاژ 3.3 ولت و 5 میباشد. رگولاتور 3.3 ولت AMS1117 تغذیه میکرو و ماژول WIFI را تامین میکند. رگولاتور MC34063 نیز ولتاژ 5 ولت سایر قطعات را تامین میکند. که به دلیل کوچک بودن سایز این رگولاتور و سلفش انتخاب شده است.

1-2 : پردازنده: برای این مورد هم از پردازنده محبوبم یعنی ATXMEGA32A4U استفاده کردم.

1-3: ESP8266: ارزان ترین و در دسترس ترین و کوچکترین و محبوب ترین ماژول وای فای موجود در دنیا میباشند.

1-4: SRF05: ماژول فاصله سنج آلتراسونیک با حداکثر اندازه گیری 5 متر
1-5: LM324: خروجی آنالوگ سنسورهای مادون قرمز TCRT5000 با استفاده از حالت مقایسگر آپ امپ تبدیل به دیجیتال شده و به میکرو منتقل میشود. از سه سنسور برای حالت مسیریاب استفاده شده است. و سنسور چهارمی هم پیش بینی شده که بتوان کنار چرخ نصب کرد و تعداد چرخیدن چرخ را شمرد که فعلا از آن استفاده نشده است.

1-6: L293 : راه اندازی موتورها به عهده درایور L293D میباشد. که امکان کنترل دو موتور را به صورت چپ-گرد / راست-گرد با جریان خروجی برای هر موتور 600 میلی آمپر را دارد.


شماتیک کل مدار:

2- PCB: برد ربات با استفاده از نرم افزار EAGLE و به صورت یک رو طراحی شده است. آموزش های این نرم افزار را از اینجا میتوانید دانلود کنید.

3 -توضیحات برنامه:
برنامه به زبان C و نرم افزار اتمل استودیو نوشته شده است. با فرض بر اینکه دوستان با برنامه نویسی زبان C آشنا هستند، قسمتهایی که بیشتر مربوط به تنظیمات سخت افزاری ATXMEGA میباشد را شرح میدهم.
3-1: در ابتدای برنامه تابع init فراخوانی شده و فرکانس میکروکنترلر با اجرای تابع osc_extclk_pll_init از کتابخانه osilator config.h در حالت اسیلاتور متصل به کریستال خارجی تنظیم میشود و با استفاده از واحدد PLL فرکانس 8 مگاهرتز ضربدر 4 شده و به 32 مگاهرتز میرسد و با توجه به این که ضرایب Prescaler A و Prescaler B و Prescaler C بدون تغییر با مقدار پیش فرض 1 میباشند فرکانس کاری CPU هم 32 مگاهرتز خواهد بود.
3-2: کنترل دور موتور: برای کنترل دور موتورها تایمر/کانتر 1 از پورت C در حالت Single-slop PWM Generation قرار داده شده و فرکانس خروجی PWM با قرار دادن مقدار 800 در رجیستر پریود تایمر بر روی 156 هرتز تنظیم شده ، خروجی PWM بر روی پایه های OC1A و OC1B فعال و تایمر با Prescaler 256 شروع به کار کرده است.
3-3: اندازه گیری فاصله با استفاده از ماژول SRF05: به صورت خلاصه با تحریک کردن پایه Trigger و اندازه گیری مدت زمان تغییر وضعیت پایه echo می توان فاصله تا مانع را بدست آورد. با تحریک پایه تریگر؛ پایه اکو به وضعیت یک تغییر میکند و بعد از دریافت برگشت امواج فراصوت وضعیت پایه به صفر برمیگردد. با توجه به اینکه اندازه گیری فاصله با مانع؛ برای جلوگیری از برخورد با مانع؛ باید پشت سر هم تکرار شود در صورتی که اندازه گیری طول پالس را CPU انجام دهد باعث مشغول شدن CPU و کاهش استفاده مفید از آن میشود. به این خاطر اندازه گیری طول پالس به قابلیت Pulse Width Capture از تایمر صفر پورت C واگذار میشود. برای این کار باید وقفه بر روی پایه میکرو که به خروجی اکو ماژول متصل است در حالت both edges فعال شود و از طریق Event به عنوان ورودی واحد کپچر تایمر متصل شود. نحوه کار تایمر در حالت اندازه گیری عرض پالس به این شکل است که با لبه بالا رونده پالس، تایمر ریست شده و از مقدار صفر شروع به شمارش میکند و با لبه پایین رونده پالس، مقداری که در شمارنده تایمر قرار دارد در رجیستر کپچر(CCX) ذخیره میشود.
در اینجا کانال صفر ایونت به PIN2 از PORTA متصل و وقفه خارجی پایه در حالت both edges به عنوان تریگر ایونت انتخاب میشود.
تنظیم تایمر در حالت کپچر:
ساخت قاب و جعبه مدار
برای ساخت یک قاب یا جعبه برای مداری که طراحی کردید یا هدیه ای که میخواهید برای کسی ببرید. میتوانید یک سر به سایت زیر بزنید شکل قاب مورد نظرتون را انتخاب کنید. ابعاد را وارد کنید و در عرض چند ثانیه فایل SVG را تحویل بگیرید. برای برش فایل را به یک برش لیزر ببرید.
https://www.festi.info/boxes.py/
